
机器人的制作流程,而且将详细的介绍3D打印和硬件电路的制作流程,帮助你打造属于自身个人的

要想打造属于自己的小π机器人,首先要想好自己的小π机器人要实现什么功能。小π机器人的特色就是功能模块化,用户都能够根据使用者自己的喜好更换,比如安装超声波探头能够直接进行手势识别,安装触须可以触摸互动,安装喇叭可以播放音乐,安装RGB三色灯能轻松实现脸部变色,安装温度传感器能播报温度等。
小π机器人的外壳使用3D打印技术,所以能自己定制自己最喜欢的外形。小π机器人外壳分为2个脚、2条腿、1个臀部支撑底座、1个脸和一个后盖。下面就是是已经制作出来的几款小π机器人:
根据自己定制的小π机器人功能设计制作相应的电路板,不过小编的团队已经开发出一款通用的电路板,上面预留了各种接口,基本能满足大家的需求。
小π机器人的程序包含单片机程序、手机APP程序和电脑上位机程序。根据自己定制的小π机器人编写相应的单片机程序,后期小编会对单片机的程序做一个详细的介绍。手机APP程序和电脑上位机程序小编的团队已经开发好了,大家直接拿来用就好了。
3D打印的设计过程是先通过计算机建模软件建模,小编团队建模时使用的是inventor软件。再将建成的三维模型“分区”成逐层的截面,即切片,从而指导打印机逐层打印。
设计软件和打印机之间协作的标准文件格式是STL文件格式。一个STL文件使用三角面来近似模拟物体的表面。三角面越小其生成的表面分辨率越高。PLY是一种通过扫描产生的三维文件的扫描器,其生成的VRML或者WRL文件经常被用作全彩打印的输入文件。

打印机通过读取文件中的横截面信息,然后将这些截面逐层地打印出来,再将各层截面粘合起来从而制造出一个实体。这种技术的特点在于其几乎可以造出任何形状的物品。
打印机打出的截面的厚度(即Z方向)以及平面方向即X-Y方向的分辨率是以dpi(像素每英寸)或者微米来计算的。一般的厚度为100微米,即0.1毫米,也有部分打印机精度更高。而平面方向则可以打印出跟激光打印机相近的分辨率。打印出来的“墨水滴”的直径通常为50到100个微米。这样的精度完全能够完全满足小π机器人的需求。
小π机器人的脸一个是狗头、一个是QQ企鹅的图案,制作的步骤中先可以再一次进行选择自己喜欢的图片,然后对图片进行轮廓提取、拉伸、切片处理,最后进行3D打印。这样,一张自己最喜欢的脸就做好了。

除腿等核心部件,小π机器人的外壳都采用空心结构,内部使用柱状填充结构,既能保持稳定,也能减轻重量、节约成本。
用传统方法制造出一个模型常常要数小时到数天,而用3D打印技术,一个小π机器人的模型几个小时就打印好了。使用不相同的3D打印机、模型的尺寸不同,打印时间会略有不同。
主控芯片使用的是两块mega2560,要对mega2560的电源做一个滤波,减小电源纹波对系统的影响。

TF卡模块会存储一些小π机器人的动作和一些音频文件,mega2560通过spi模式或者sdio模式进行一定的读写。
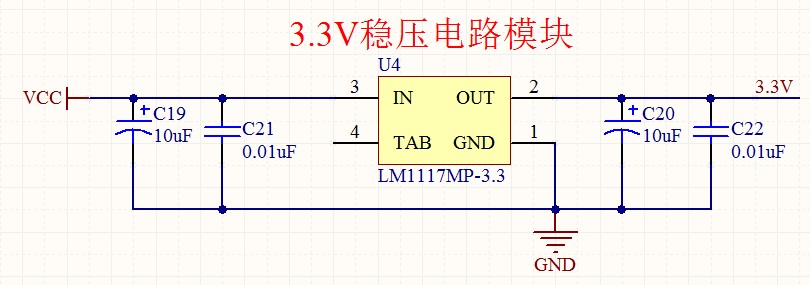
由于锂电池电压为3.7V左右,mega2560是3.3V供电,所以要降压,降压使用的是常见的LM1117。
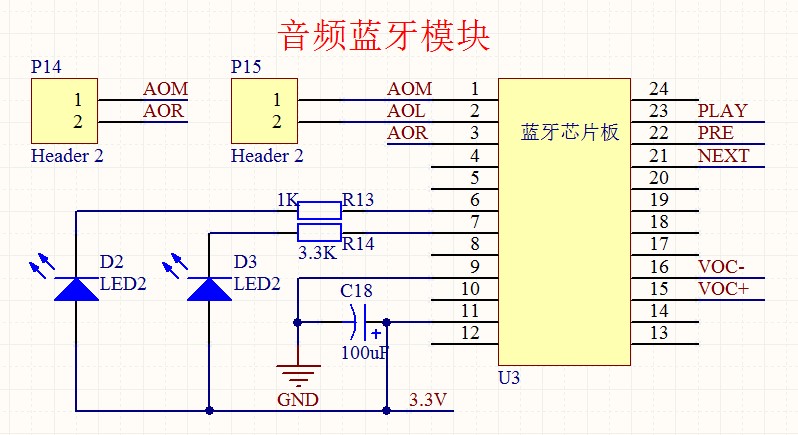
共阳极七彩LED模块能够最终靠编程实现1600多万种颜色,可以变脸的那个小π机器人就是使用的这个模块。
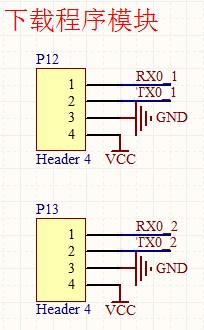
通过串口可以向两块mega2560下载程序,也能够最终靠串口输出一些调试信息,两块mega2560之间的通信也是通过串口实现的。
主控模块由两块mega2560构成。这是因为单片机是单线程的,控制模块要同时控制舵机的角度并实现音频处理、七彩LED控制、超声波检验测试等附加的功能,所以要两块mega2560。
PCB采用双层布线,红色的是顶层布图,蓝色的是底层布图,底板的PCB版图如下:

